Full Transcript
Loading transcript…
https://www.youtube.com/watch?v=Evsjp0zKeGw
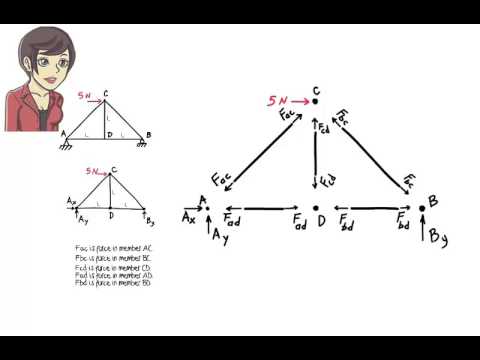
TL;DR — This video explains how to analyze statically determinant trusses using the method of joints. It defines a truss as a structure of slender members connected by frictionless pins, where loads are applied only at the joints. The analysis involves ensuring the number of unknown forces (member forces and support reactions) equals the number of equilibrium equations available (twice the number of joints).
Takeaway — The method of joints is a systematic approach to calculating axial forces in truss members by applying equilibrium principles to each joint individually.